Active Sensing
Active sensing refers to using autonomous robots to proactively explore an unknown environment or gather information of object states, and it holds great potential for both civil and military applications, such as search and rescue, environmental monitoring, surveillance and reconnaissance. In the active sensing, both motion planning and perception are inherently coupled in that trajectories determine the informativeness of observations, and the observations in turn guide the trajectory generation. The abilitiy to generate informative paths/trajectories is the key factor in successful active sensing.
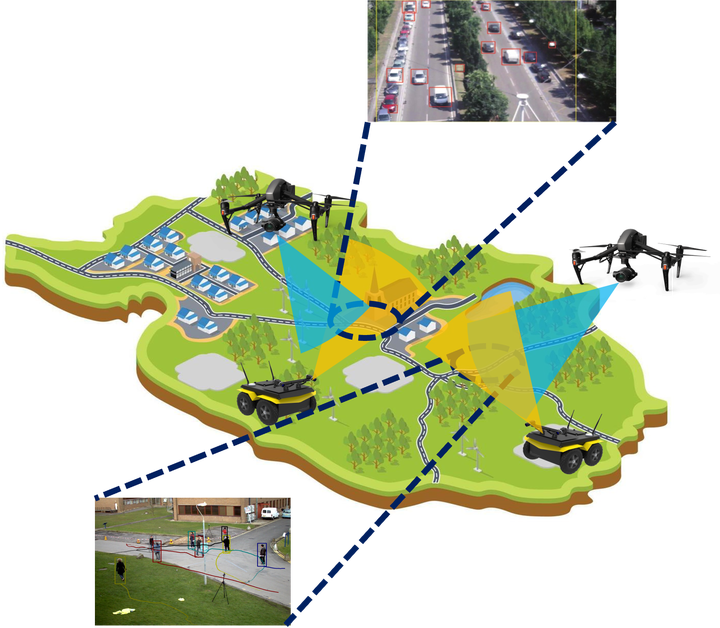
Among various tasks of active sensing, we focus on target search and tracking using autonomous robots. We develop informative-theoretic trajectory planning approaches for mobile robots to actively search and track moving targets, the motion models of which can be linear, nonlinear, or even unknown a priori.