Human Robot Collaboration
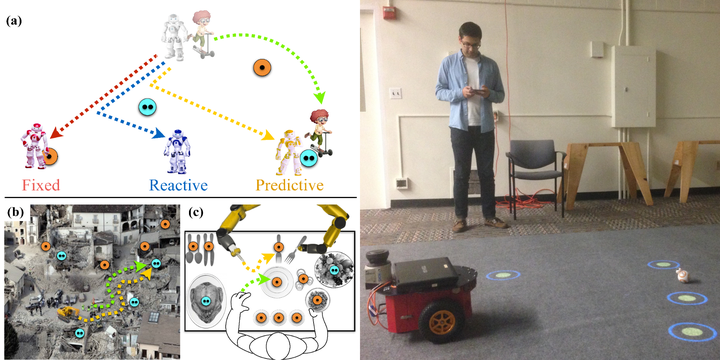
Intention-Aware Robots Human-robot Interaction (HRI) has been an increasingly popular research area due to the boom in personal and industrial robots. We are especially interested in enabling robots to collaborate as peers with the human. On one hand, we utilize Bayesian inference approach to help robots identify human’s intention and then provide assistance accordingly. On the other hand, we model how human anticipates the collaborative robot’s plan based on the partial actions that the robot has made. These two aspects close the interaction loop between human and robot and can be useful for developing algorithms to improve human-robot collaboration.
Companion Robot With robots stepping into daily life of human beings, various applications for improving human life qualify has been envisioned. We are interested in enabling robots to work as companions of humans, walking with a target human while carrying items for the human. Especially, we have developed a trajectory planning algorithm for robots to autonomously follow a target human, using onboard cameras.Due to the uncertainty in human’s motion, we proposed a Parallel Interacting Multiple Model-Unscented Kalman Filter (PIMM-UKF) approch for human motion estimation and prediction. Based on the predicted human states, an MPC path planner is developed to produce safe and comfortable following trajectory of the robot.