Distributed Filtering
Distributed filtering using multiple mobile robots has many important applications such as environmental monitoring, SLAM, and target localization. While significant achievements have been made for distributed linear filtering, the counterparts for nonlinear filtering techniques fall short.
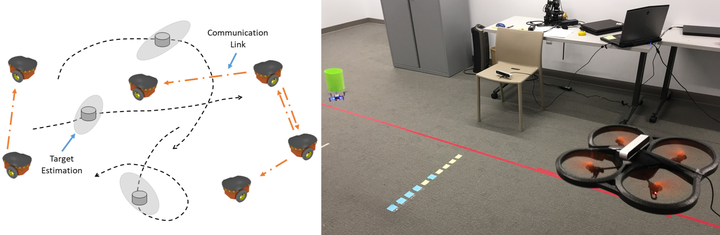
We propose a measurement dissemination-based distributed Bayesian filter for nonlinear estimation of target position under either fixed or time-variant communication topologies. Such method has been shown to generate consistent estimation and fast convergence performance.